
船舶管理事業共栄マリンの特徴と実績
私たちは、オフショア船において様々なプロジェクトに対応してきました。ソフトとハード両面への対応力を持っていることが特徴です。
実績あるプロジェクトの数々





01
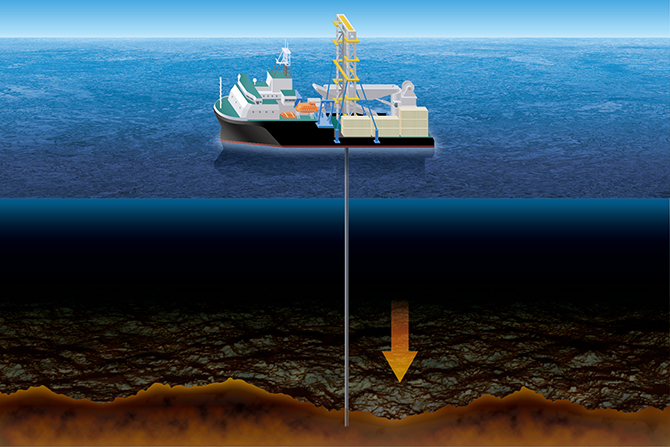
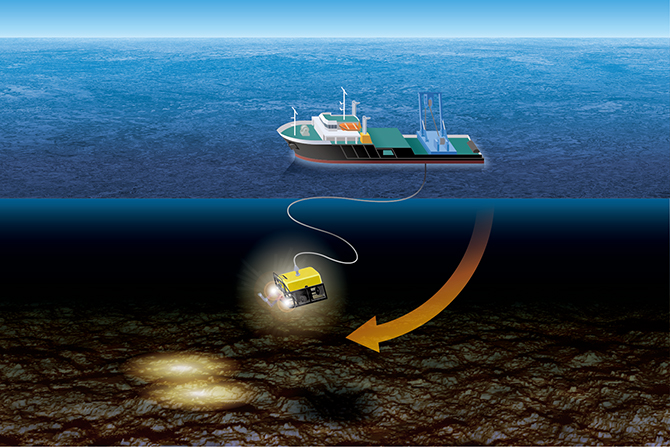
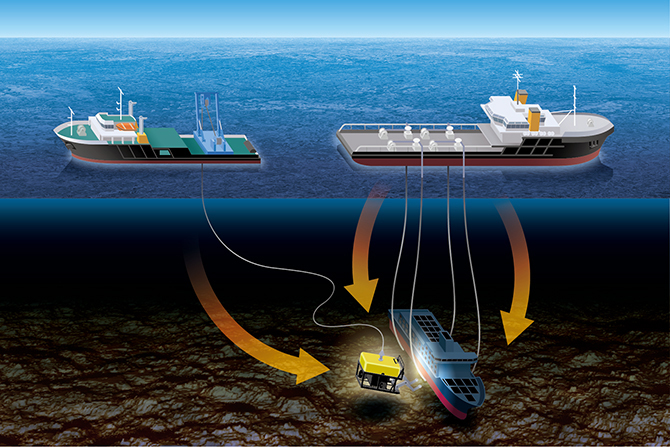
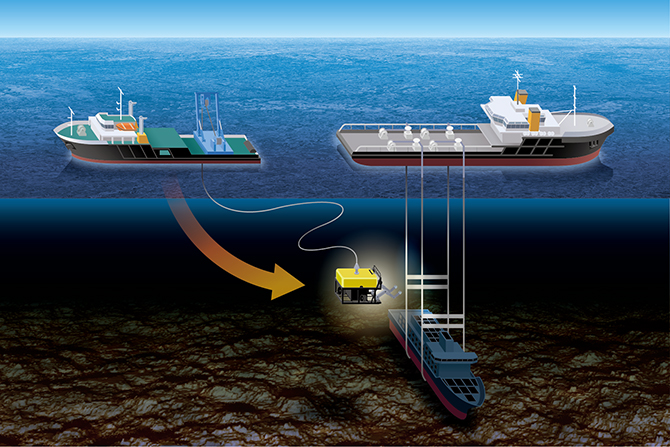
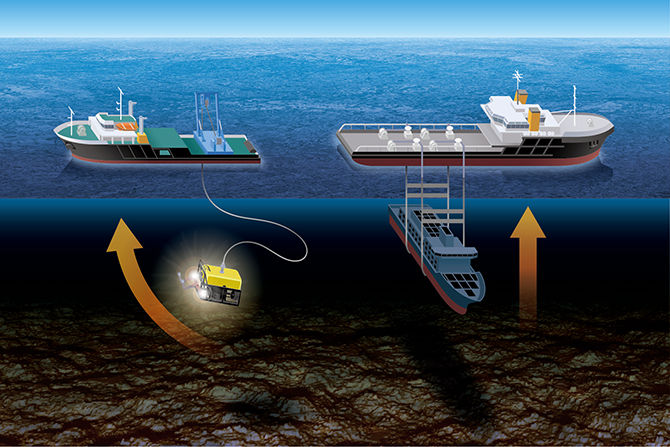
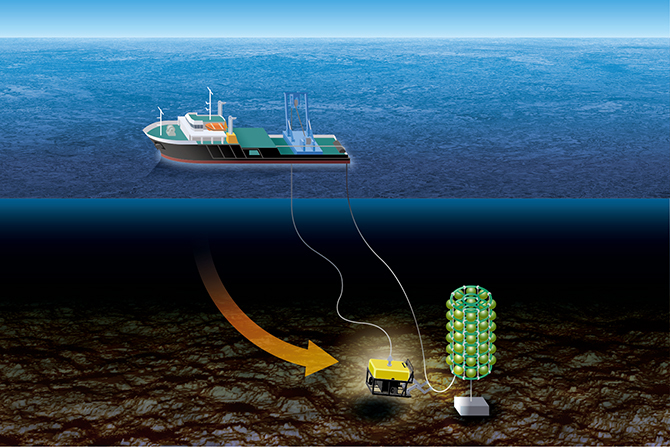
海底掘削調査
メタンハイドレートなど海底資源の調査のため、ドリルを用いて海底掘削調査を行います。
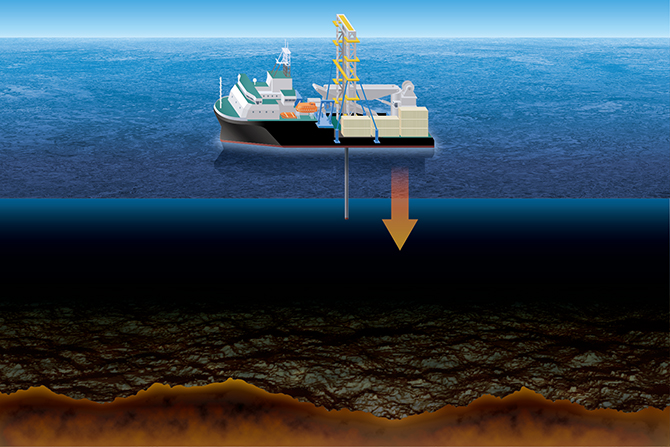
※ロボット・ドリル操作:専門チームが乗船し行います。


02
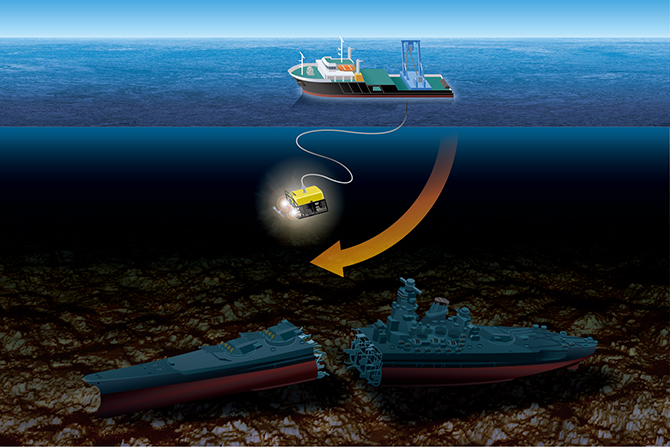
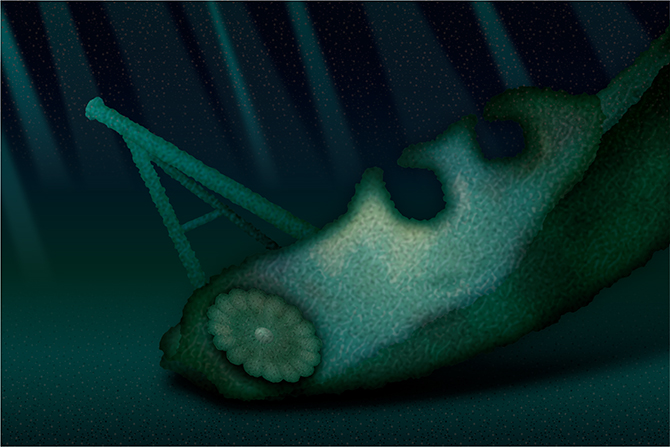
戦艦大和調査
2016年5月水中ロボット(ROV)を用い、戦艦大和の撮影調査を実施しました。
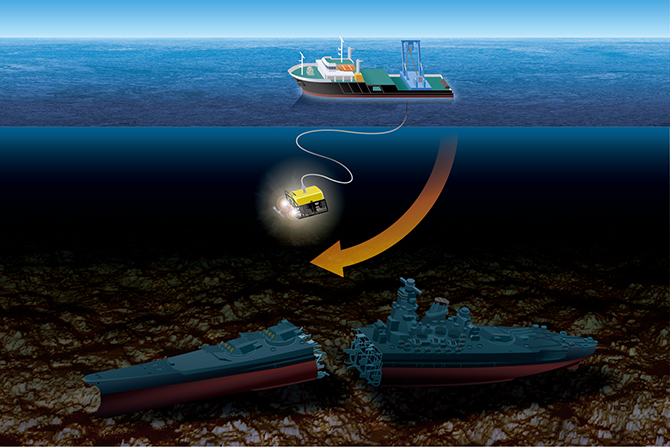
※ロボット・ドリル操作:専門チームが乗船し行います。
03
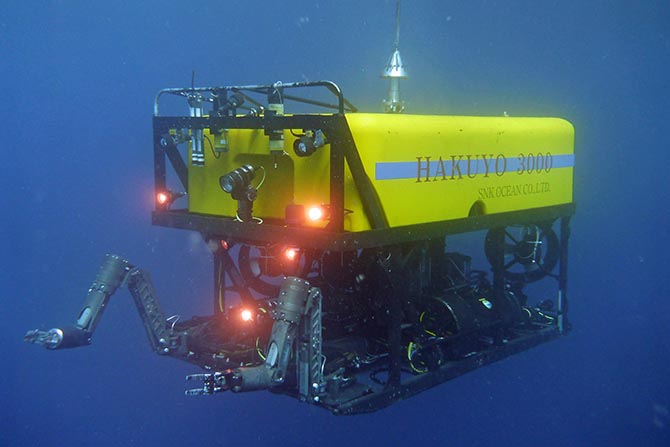
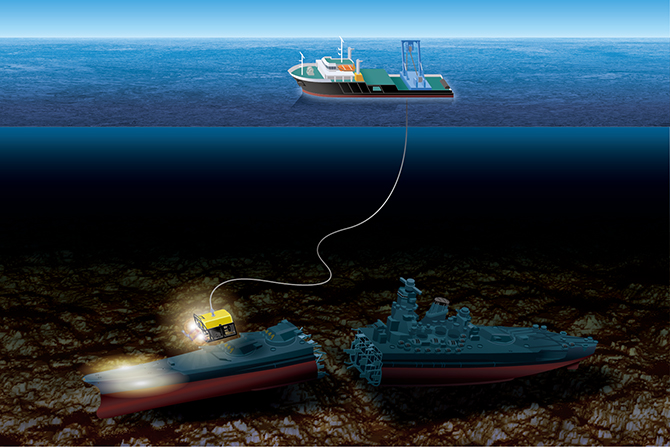
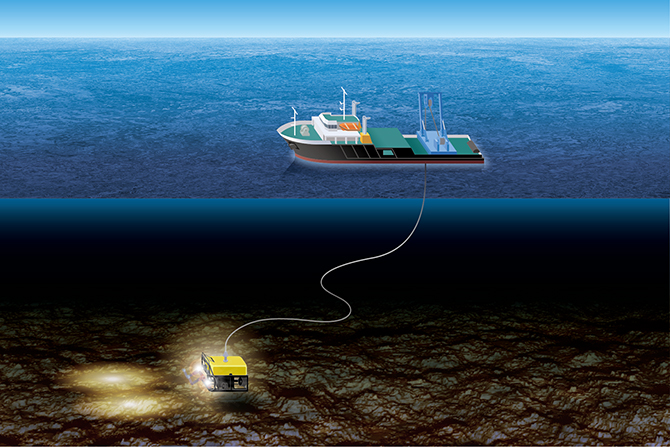
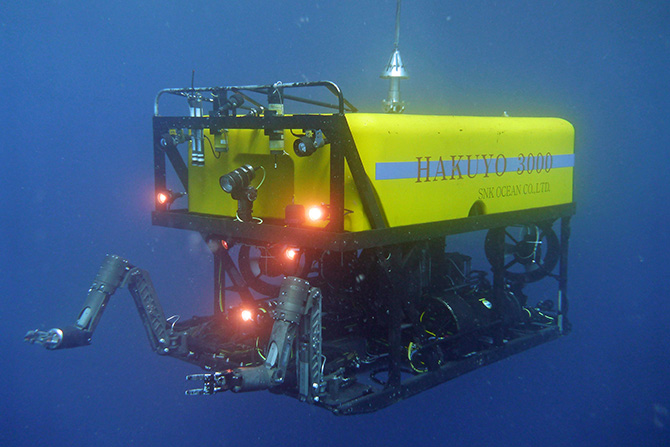
ROV海底調査
水中ロボット(ROV)を用い、海底における各種撮影調査・作業を行います。
※ロボット操作:専門チームが乗船し行います。
04
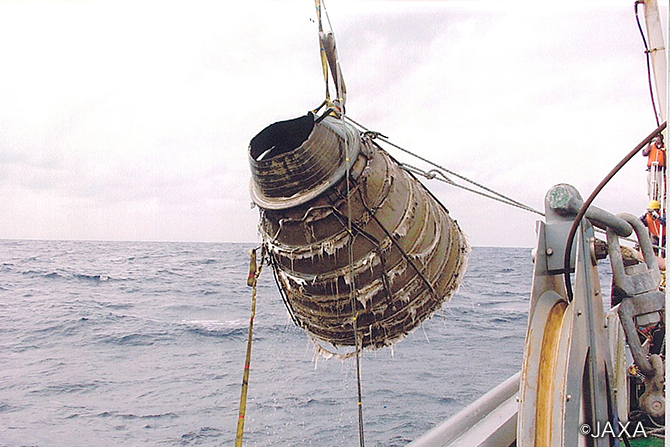
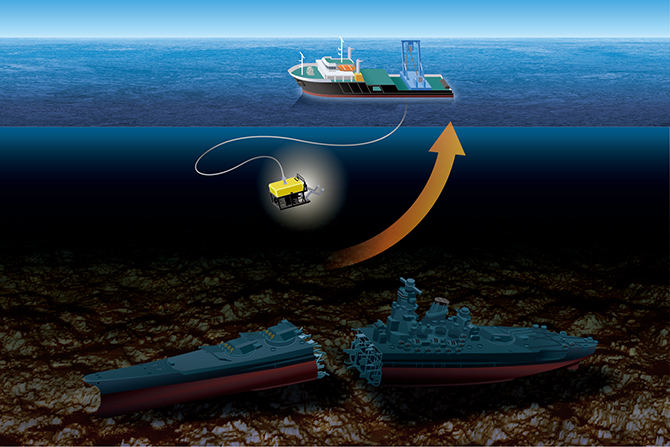
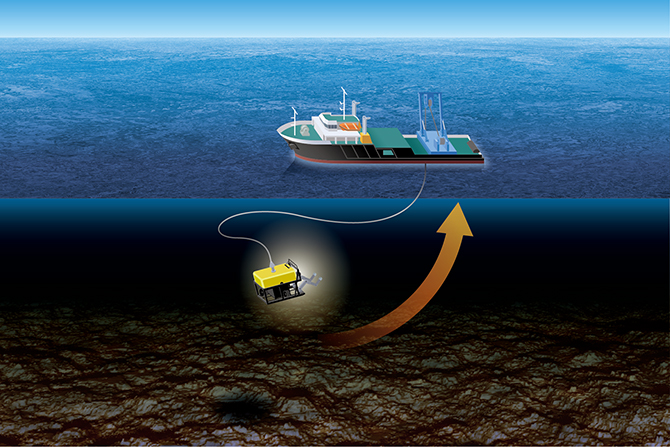
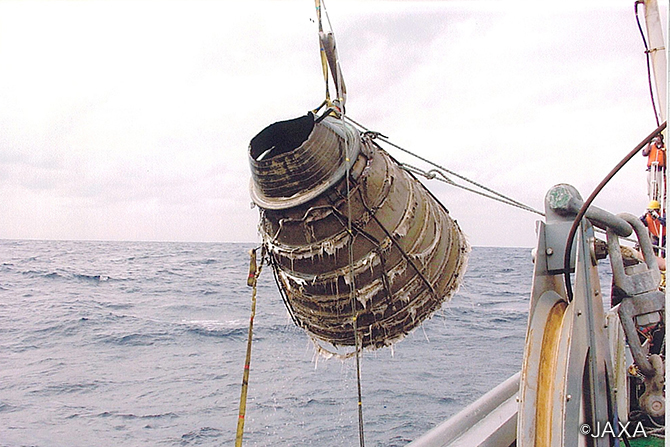
沈没物引揚
沈没した物体を、水中ロボット(ROV)を用いて作業し引き揚げます。
※ロボット操作:専門チームが乗船し行います。
05
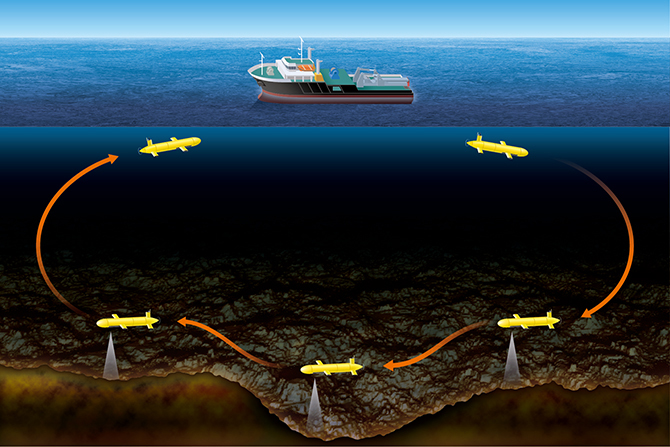
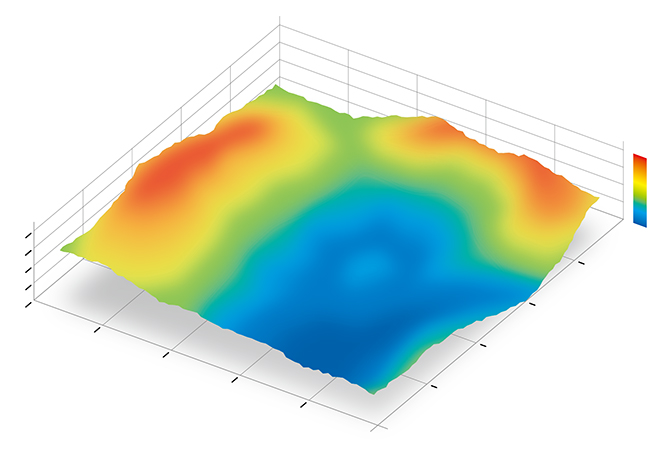
AUV地形調査
水中ドローン(AUV)を用いて海底地形調査を行います。
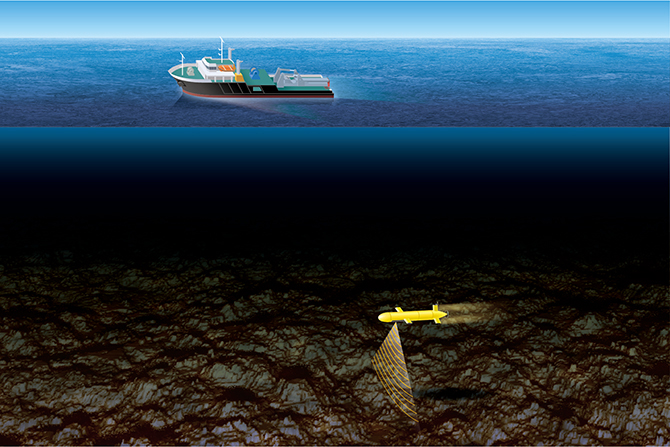
※ロボット操作:専門チームが乗船し行います。
06
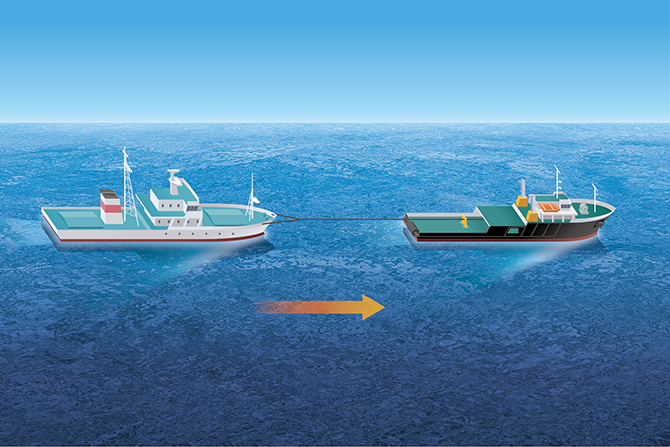
サルベージ
故障・座礁した船舶を、指定の港まで曳航します。




07
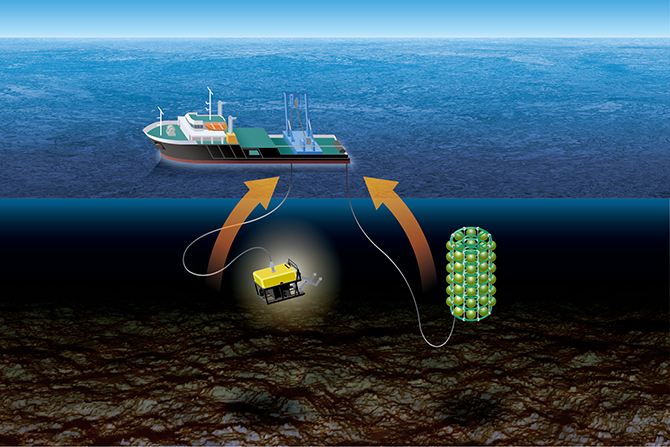
浮漁礁回収
海の中層に設置した浮体式人工漁礁を、水中ロボット(ROV)を用いて回収します。
※ロボット操作:専門チームが乗船し行います。

08
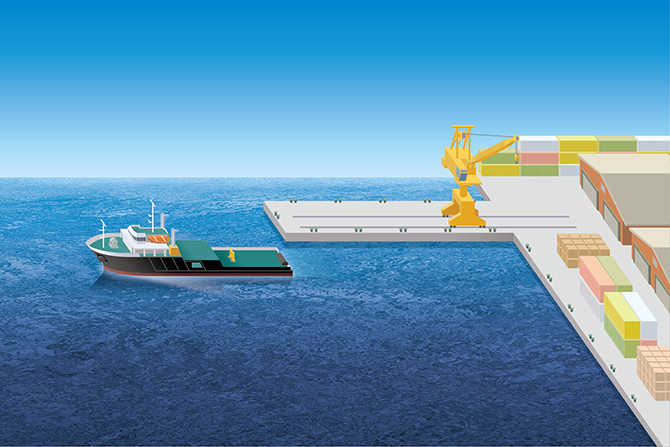
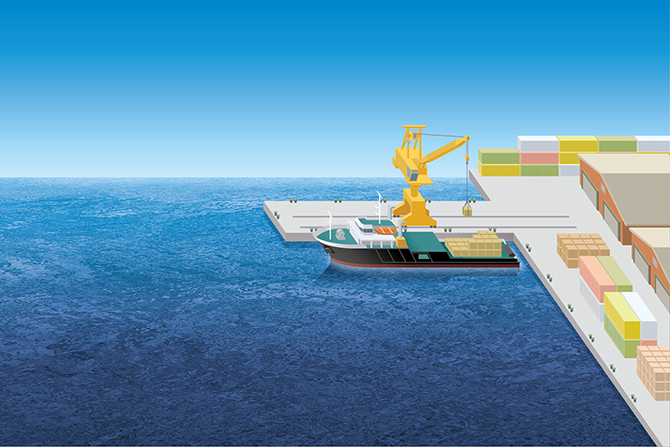
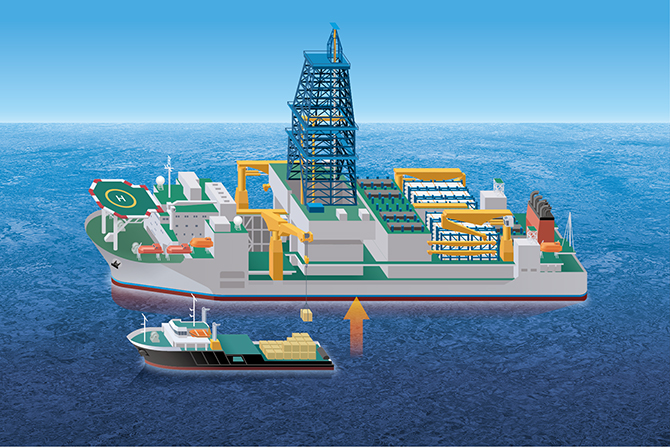
洋上へ物資補給
洋上の船舶やリグ等へ、物資・資材の補給・回収を行います。

ソフト・ハード両面への対応力
私たちは、様々なプロジェクトに対応してきました。その中で、手順書等のソフト面、機器等のハード面いずれにも対応できることが当社の特徴です。


– 私たちにできること –
- 自動船位保持システム(Dynamic Positioning System: DPS)手順書作成および機器の運用
- 曳航手順書作成および曳航ウインチ、トウピン、シャークジョーの運用
- STS(Ship to ship)手順書の作成
- 掘削時の対応手順書(WOSG)の作成
- アジマススラスターの運用
- ヒーブコンペンセイション機能付きクレーンの運用
- トートワイヤーシステムの運用
- オペレーター搭載機器と船舶設備との管理調整
- 多人数乗船に対するランドリーサービス供食 等
外部からの検船対応
外国からの傭船プロジェクトにおいて、オフショア船の検船に対応してきました。2025年にはIMCAのメンバーシップに加入しております。基準や考え方が日本と異なりますので、そのことを踏まえて対応します。
– 私たちの対応実績 –
- IMCAのeCMID
- OCIMFのOVID
- その他オイルメジャーの検船
- 欧州のコントラクター独自の基準による検船 等